Design Thinking and Innovation
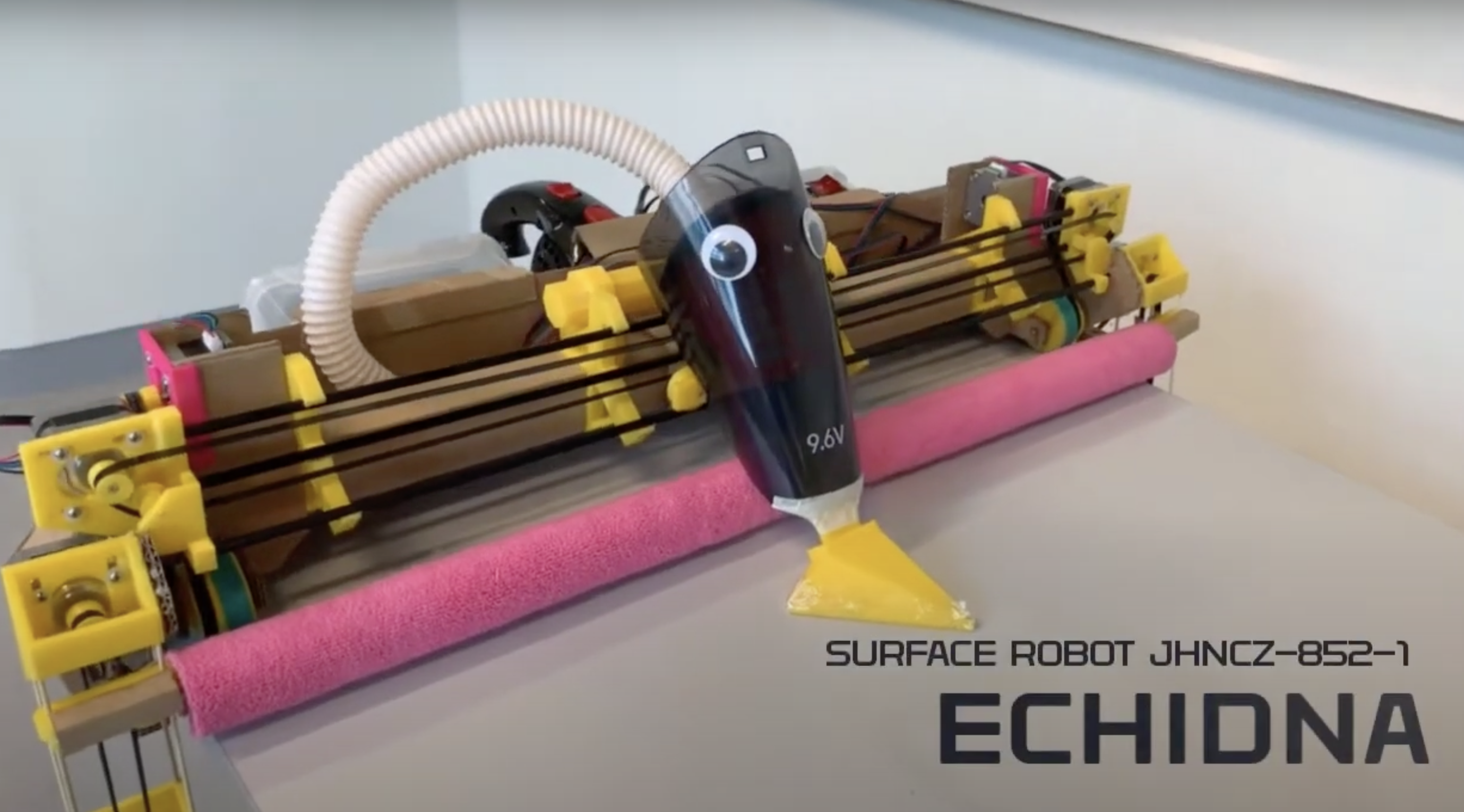
Developed an autonomous cleaning robot to address the inefficiency of traditional sanitation in crowded public spaces during the pandemic.
The robot efficiently cleans all five exposed surfaces of a tabletop, with a companion robot transporting it to the target surface.
The project aimed to enhance cleaning efficiency, particularly focusing on tables.
The model's goal is to minimize cleaning time for a 69cm table, varying the stepper motor's revolutions per second for optimal efficiency in detecting and vacuuming dry solid food wastes.
Our activities centered around design methods with defined milestones, progressing through the four design phases: discover, define, develop, and deliver for each project part.
We engaged in a team design project with regular reviews and feedback.